
Slow-Botics, Mycelium & Sustainable Footwear Design with Dr. Natalie Alima
CDFAM Speaker Series - Expert Interview
In our most recent CDFAM Symposium interview, I spoke with Dr. Natalie Alima from Biolab and Adidas about the relationship between biology, robotics, and computational design.
Bridging the gap between nature and advanced technologies. Specializing in radical computational design methodologies, innovative robotic fabrication technologies, and cutting-edge sustainable materials such as mycelium, Dr. Natalie Alima explores the architectural, art and product form through a multidisciplinary approach.
Drawing inspiration from the biomedical, scientific, and robotic industries, she combines 3D printing of sustainable materials with computational design to provide alternatives to existing petrochemical materials.
Join us as we discuss her work at the intersection of biology, robotics, and design, and learn how she's making an impact on the future of sustainable innovation.
The conversation topics include:
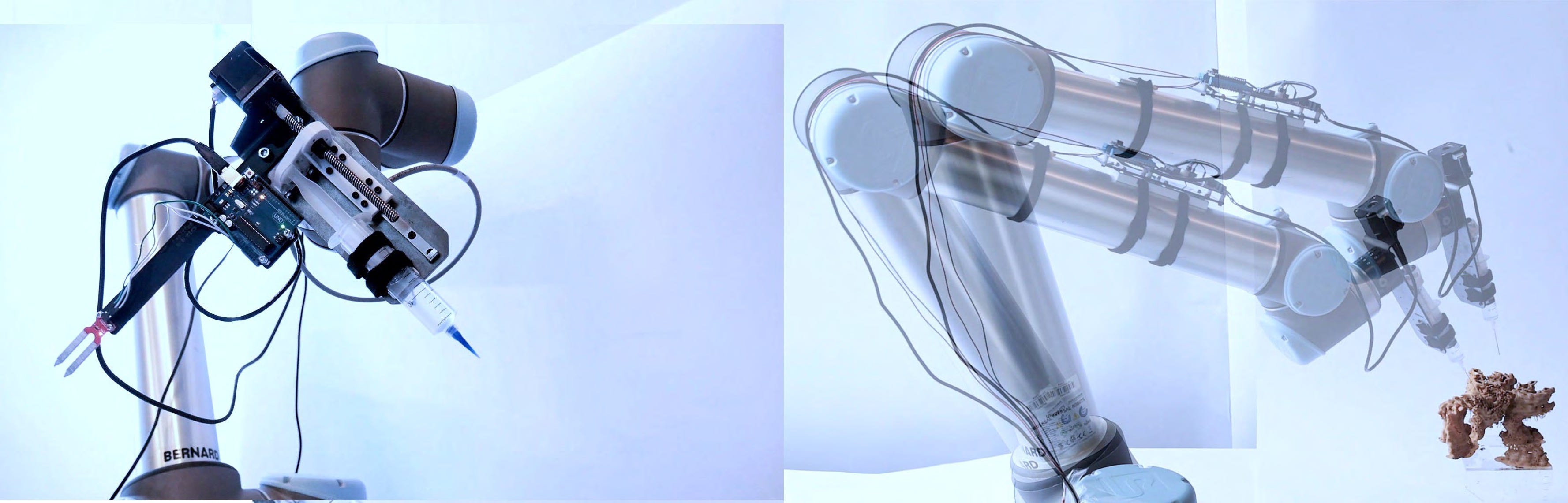
The use of mycelium as a material and the employment of robotics to guide its formation, demonstrating the interaction between computer-designed structures and natural growth processes as sculptural works for sale.
The software and tools Dr. Alima utilizes in her research for designing forms and controlling robots, as well as how her academic work informs her role at Adidas in the development of bio-based products for the commercial market.
The challenges and opportunities in moving from 'slow-botics' to the fast-paced world of footwear manufacturing, and the potential for integrating robotic feedback systems into commercial applications in the future.
To learn more about Dr. Natalie Alima's work, register for the CDFAM Symposium to attend her presentation: Interspecies Forms: Robotic Feedback Systems Between Mycelia Growth & Computational Form.

Tell us a little about what you will be presenting at CDFAM?
Robotic feedback systems between biological growth and computational design.
What led you to first explore mycelium as a material and use robotics to guide its formation?
During my PhD research, I discovered that many of the existing bio design applications, utilize nature as a sustainable alternative in order to replace synthetic materials such as plastics and concrete within the construction industry.
By making nature inert, I believe that a crucial material driven design process is missing. Rather than utilizing nature as a material for human centric applications, I questioned whether we can work with nature's agency in a co-creational manner in order to generate novel- interspecies forms.
Through my research, I therefore develop feedback systems in which the robot, biological matter and computational form all have a direct line of communication with one another.

How do you define the amount of control that software and robotics have over the final form of the printed objects, compared to the natural growth process?
Through the established feedback systems between fungi growth, computational form and robotic movement; a battle and symbiotic tension if formed over the dominance of form.
In this sense, the architect and organism work in harmony to ensure that each formal outcome is an equal hybrid between architectural and biological agency.
During this process, architectural form orchestrates biological growth, whilst biological growth orchestrates robotic movement.

In a previous conversation, we discussed how researchers had used slime mold to grow and learn optimal pathways between food sources, with results that were strikingly similar to Tokyo Subway maps. Similarly, you have coaxed mycelium to create desired forms. How can we capture this process in software and use it to design similarly complex systems?
When working with nature, we must understand it chemical characteristics and how it behaves.
Through a series of scientific experiments, one must examine how the organism grows and reacts to its environment and what factors encourage or hinder its growth. Within my research, I discovered which forms, environments and substrates enabled the organism to flourish or hinder its growth.
Through architectural tools such as computational design and 3D- printing, I was therefore able to orchestrate the fungus in order to generate a set of bespoke patterns of entangled growth.
What software do you use to design forms and control the robots, and is there any feedback between the two in the design and fabrication process?
To design each form, I use a fusion of Houdini, Z-brush and Grasshopper.
I often go back and forth between each computational program in order to generate a sense of ambiguity of how the form was generated.
My design aesthetic explores heterogeneous skins that blur the boundaries between the natural and the artificial realms. This is achieved through materiality and form. I am also a very hands-on designer.
Everything that I design, I robotically fabricate and infuse with mycelium in order to examine how the organism reacts to the form and what may be advanced for the next design iteration. This results in a catalog of forms that evolve in complexity and detail over time.

How did you transition from researching mycelium-tending robotics to designing footwear at Adidas, and how does your research inform your work there?
When completing my PhD I was searching for job opportunities that were interested in innovative methods of make, new materials and design innovation. That is when I found Adidas.
Working with a company such as Adidas, has enabled me to apply my research to the commercial market. What is interesting about this transition from academia to the commercial industry, is solving issues such as mass producing bio based products, cost and durability.
Your previous work on 'slow-botics' involved tending the growth of mycelium over a period of weeks, whereas consumer footwear typically needs to be manufactured very quickly in order to be financially viable. How do these two different timeframes and worlds meet in your current work?
Whilst robots have proven to have a plethora of applications, most people equate machines to speed and efficiency. However, there is something quite poetic and mesmerizing about robotic movement which I attempt to capture within my research.
Watching a robotic arm tend to mycelia growth through a process of slow-botics is something that I explore in order to generate form in real time.
The robot patiently waits for any signs of biological growth and tends to the organism accordingly. This process occurs over a monthly period resulting in a slow dance between fungi growth and robotic intervention.
Whilst this methodology is applicable in a conceptual sense, it is a vast contrast to the commercial application of robotics, where speed and efficiency is crucial.
Whilst real time robotics has yet to be applied in the production of shoes, I believe a robotic feedback system may be showcased in commercial stores, in order to appeal to customer experience and human interface.

With speakers at CDFAM from various design software companies, material and machine companies - including Carbon, who Adidas has worked with in the past - and academics at the forefront of machine learning and artificial intelligence, what are you most looking forward to learning from the other speakers at the event?
What I hope to gain from the other speakers is an insight into their research and technology.
I am always interested in how engineers or designers apply robotic or scientific processes to the design industry to generate innovate novel products.
To learn more about Natalie’s work register to attend CDFAM 23 in NYC.
If you would like to own a BioScaffold sculpture, bespoke forms are available for sale via the BioLab Studio Shop and follow BioLab on Instagram.
BioScaffolds are a series of bespoke, 3D-printed sculptures made from wood-based bioplastic. These ornamental sculptures explore a hybridization of robotic fabrication and sustainable material technologies. Form is designed in microscopic detail through computational algorithmic code that blurs the boundaries between the natural and the artificial realms.
